# Mobileye CEO Presentation “Now. Next. Beyond” / Amnon Shashua @ CES 2025
The presentation highlights Mobileye’s future projections and strategies while cautioning about the uncertainties and risks involved.
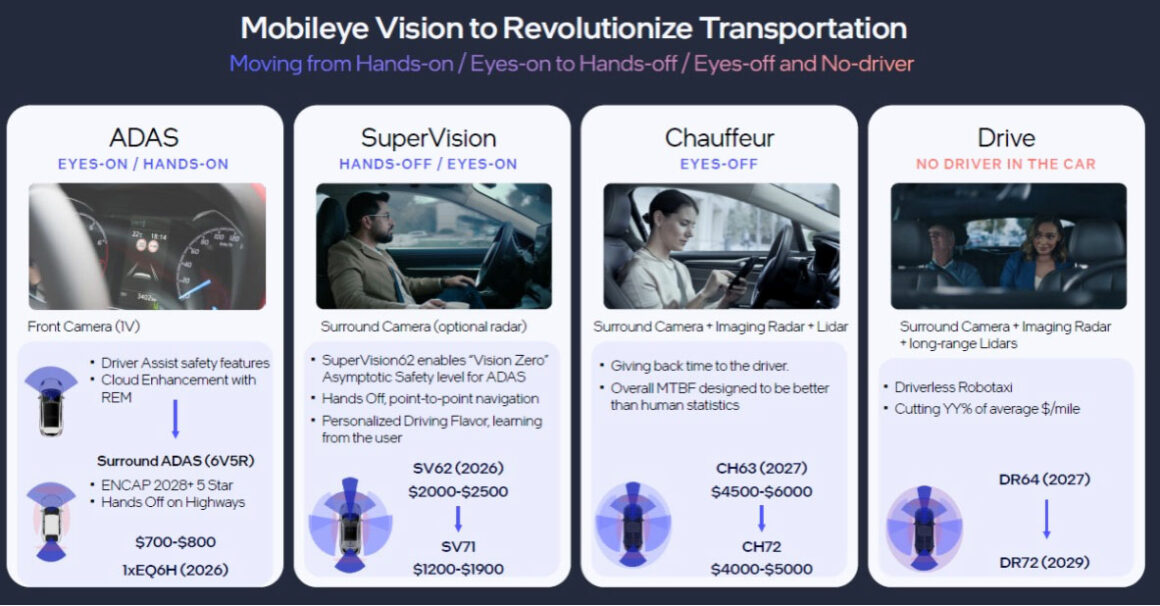
Revolutionizing Transportation:
There are two main strategies for developing AD vehicles, both aiming for AD L5.
- The first path followed by Waymo was to achieve very soon (before 2024) about 100% of precision (that means a high MTBF for “eyes-off” or “no driver” AD systems), but in a same time a reduced Recall (low ODD conditions, specific geographic locations, and high costs on sensing and computing systems).
- As a second path, Tesla initially focused on higher Recall over lower Precision (MTBF between 5 to10 hours) because covering in same time wider ODDs and lower production costs. Their vehicles are particularly deployed with AD L2 and AD L2+ levels.
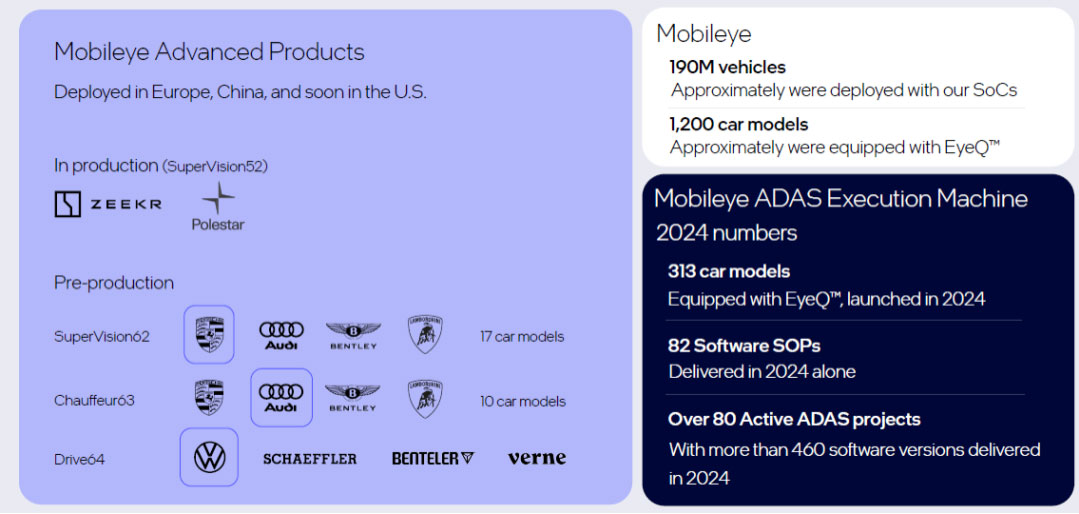
Mobileye is following a similar path than Tesla with its SV52 supervision system which has reached more than 300.000 units in China since 2021 with EyeQ5 and is continuing to grow in Europe and US with Polestar. In 2026, SV62 will enhance the supervision system’s precision on future Porsche (development leader), Audi, and Volkswagen models with EyeQ6-H, enabling AD L2+ capabilities.

Mobileye’s Chauffeur system (SV63), led by Audi will launch in 2027. It will achieve an “Eyes-Off” level with the highest precision, by a consequent enhancement of its sensing system (originally based on two EyeQ6 Cameras), with an additional EyeQ6, corner imaging Radars and Lidars. Despite this highest Precision given by a richer sensing system, costs will not be sacrificed. Costs will be optimized by a reduction of ODD to highways. All driving situations on highways will be covered up to 130 km/h.
But to achieve comprehensive “Eyes-Off” capabilities, scaling geographically might present numerous edge cases that fall outside the current distribution.
For Mobileye, two approaches could facilitate this generalization and Recall level:
- Collect exhaustive data in diverse situations
- And/or inject abstractions that transforms “out-of-distribution” and edge-cases to typical, in-distribution, case.
Mobileye design principles are currently based on:
- Leveraging ADAS data (285 Petabytes currently) collected over 20 years.
- REM (56.6 billion miles harvested) through crowdsources technics
- Using redundant systems where each relies on a different abstraction
The Five Pillars considered by Mobileye:
1/Safety:
Self-driving system with Human-level MTBF is not sufficient because humans are expected to properly respond to events even when those are extremely rare (e.g., baby lying on the road). Human driving statistics are heavily influenced by illegal or irresponsible behaviours (e.g., driving under the influence, texting while driving).
For Mobileye, Self-driving system safety goals must be:
- Absence of “unreasonable risks”, with a transparent definition of the boundary between reasonable and “unreasonable risks”.
- The overall MTBF of the system should be better than human statistics.
Mobileye’s Safety Architecture addresses four types of errors, with four methodologies to manage it:
- Planning Errors: due to mis-interpreting the intentions of other road usersandHuman planning errors (lapse of judgement).
==> RSS (Responsibility-Sensitive Safety): is a technology neutral safety model for errors predictions. RSS adheres to five safety rules: Safe distance, cutting-in, right of way, limited visibility and avoid crashes. - Identifiable Errors likeHardware failures (e.g. a sensor malfunctions)or Software bugs (e.g., memory corruption).
==> Fusa (Functional Safety):Defined by ISO 26262,its goal is to reduce the risk associated with a product’s failure as much as possible using safety systems that are designed to detect any potential hazards and then take corrective action if necessary. Redundancy is one of solutions. - Reproducible Errors whenthe system fails, without understanding that it fails (but when it is easy to reproduce the error in a test track) or “Unreasonable risk” (e.g. Baby lying on the road)or“Reasonable risk” (2 flat tires simultaneously).
==> Eliminate ‘unreasonable’ is realised through SOTIF method (Safety of the intended functionality) defined by ISO 21448. - Black Swans or rare errors corresponding with unexpected failures that cannot be easily predicted or reproduced like “AI bugs”.
==> Redundancies through PGF (Primary Guardian Fallback) is a Mobileye’s methodology leveraging redundancies so that failure involves at least two sub-systems With three different sensors (Camera, Radar, Lidar) covering the same field of view, two options can be considered:- Worst case approach: If any of the sensors requests a braking operation, we should brake. The probability of unnecessary braking increases by a factor of 3
Either option compromises comfort in favour of safety or it does not cover non-binary decisions.
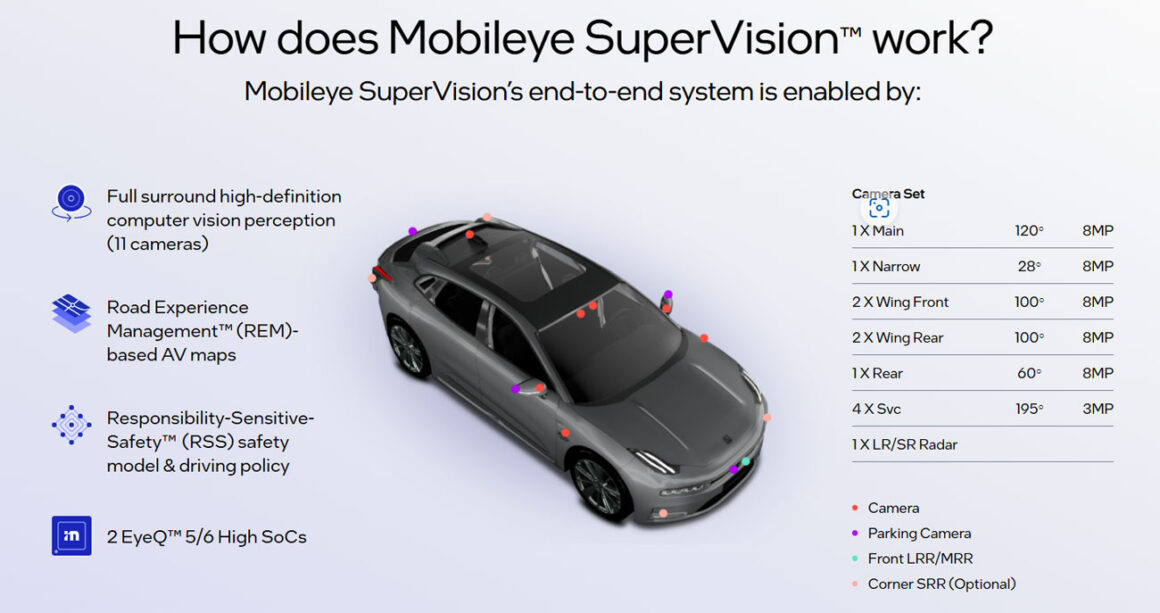
2/Technology Stack:
Leveraging CAIS (Compound AI Systems) architecture, EyeQ™6H, and BSR imaging radar will enhance autonomous capabilities.
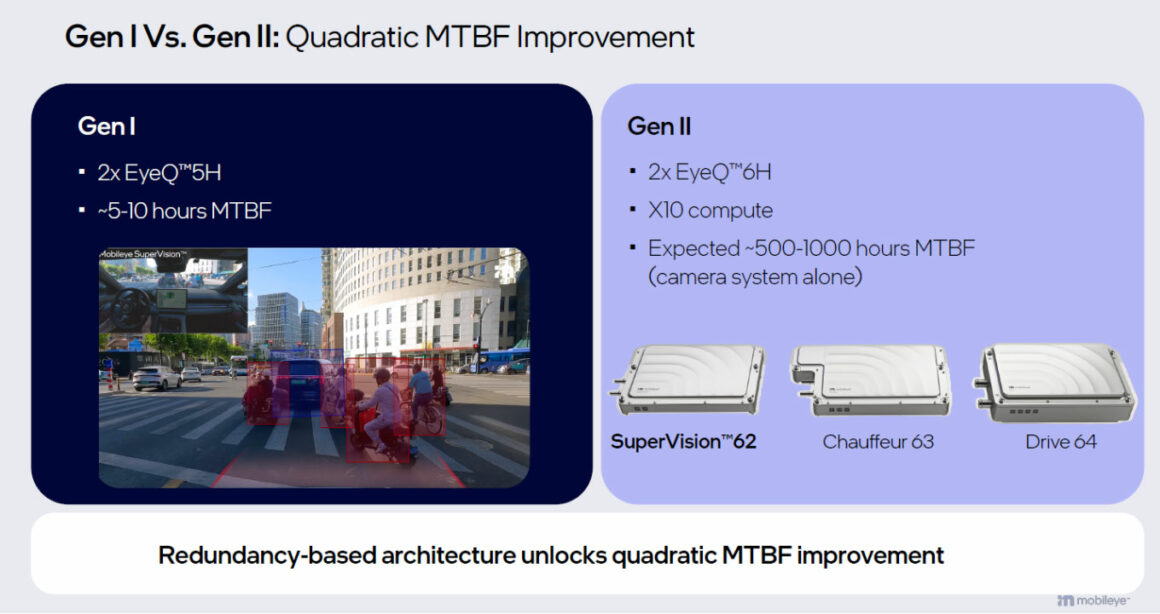
EyeQ™6H boasts three times the compute power of the preceding EyeQ5H chip yet consumes just 25% more power. With such a dramatic increase in its performance-to-consumption ratio, our newest premium ADAS chip can support even more advanced driver-assistance features than its predecessor. But EyeQ6H doesn’t just do better than previous iterations of EyeQx – it also does more.
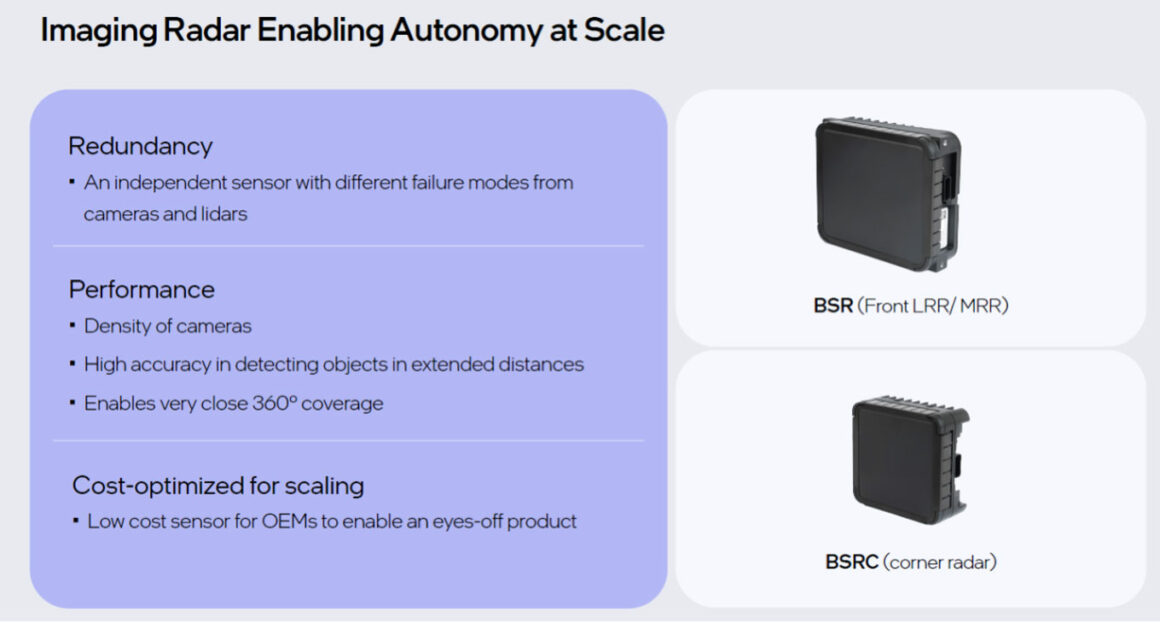
BSR Imaging Radar: Mobileye’s advancements in imaging radar technology, emphasizing redundancy, performance, and cost optimization. BSR’s precise detection enables the system to discern objects in unique scenarios, such as stationary vehicles under a bridge. It generates a rich point cloud that facilitates AV driving capabilities such as exact lane assignment and the ability to react quickly at high speeds.
BSR imaging radar complies with OEMs requirements (minimum distance 130m) on specific targets.

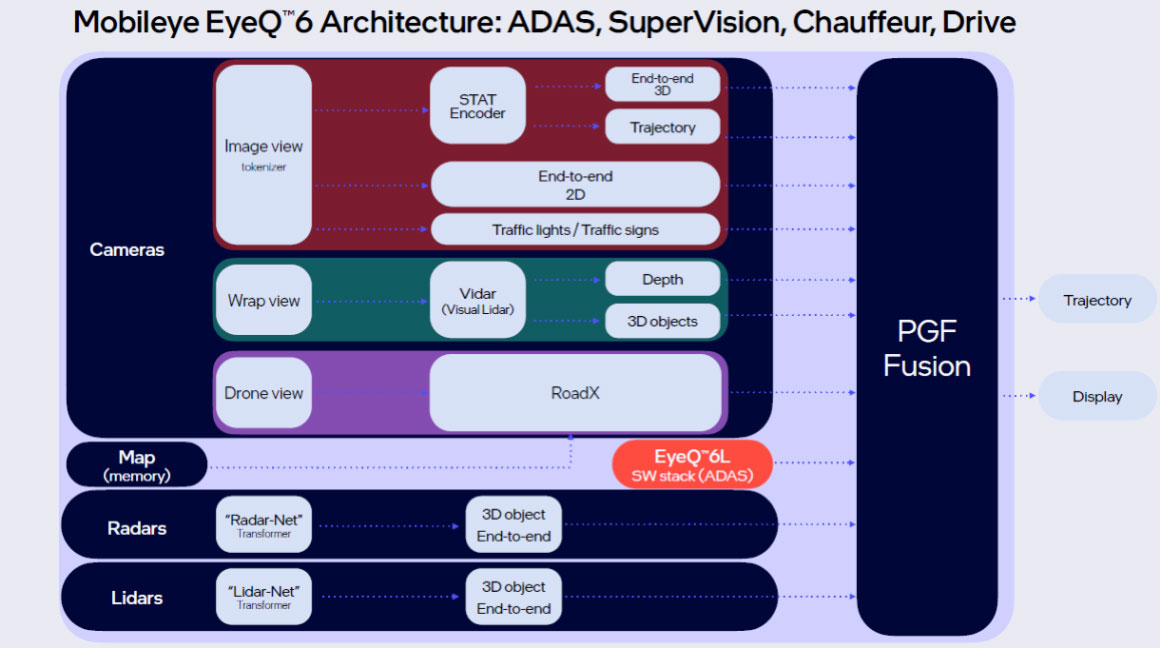
The internal Mobileye’s EyeQ6 architecture dedicated to Supervision, Chauffeur and Drive AD versions, is based on Safety Architecture. Aiming to eliminate unreasonable risks through redundant systems and transparent boundaries between reasonable and unreasonable risks. Different integrated subfunctions assume 2D, 3D object’s tracking by each sensing technology, Road mapping, road objects like traffic lights/signs. These objects and contexts (mapping) are injected into the PFG Fusion block. This block ensures reliable decision-making by using multiple subsystems to validate sensor data.
3/Scalability:
Scalability is offered by the ability of an autonomous system to expand its ODD (road types, weather conditions, speed limit, etc.) over time.
Mobileye plans to expand ODD with Chauffeur supervision, starting with highways, ramps, and speeds up to 130 km/h. They will gradually enhance ODDs by adding for redundancy:
- 4 surround imaging radars
- 4xEyeQ™6H or 2xEyeQ™7H for computing.
Both add up to a marginal cost increase.
4/Productization:
Transitioning from demo to real product by meeting industry standards and collaborating with OEMs.
The path to productization presents significant challenges
- Geographic scalability:
- More than 50 OEMs using Mobileye systems
- REM covers over 95% of the roads in the US and EU
- Over 285PB of ‘full video’ clips worldwide
- Multiple car models and OEMs: Support spectrum of requirements and sensors
- DXP – allows the OEM to code and control unique elements in the system affecting the driving experience
- Modular AI stack (CAIS) Facilitates the development process to adapt to changes of sensors and their placement on the vehicle
- Meeting industry standards: Automotive grade, FuSa, SOTIF
- Proven experience as an ADAS supplier – Over 50 OEMs, 1,200 car models, and shipping more than 190M EyeQ™ chips
- Successfully deployed Supervision (SV52, SV62) in both China and Europe
- Transparent safety architecture
4/Costs:
The costs of SV62 ($2000-$2500) for AD L2,L2+ could be doubled for AD L3 with CH63 ($4500-$6000)