For AEye, software-definable means their lidar settings—object revisit rate, instantaneous (angular) resolution, and classification range—can be tuned or reconfigured on the fly to optimize performance and power consumption, depending on the use case. AEye’s lidar capabilities can be updated or reprogrammed in the field, over the air (OTA), allowing for faster deployment of new features…
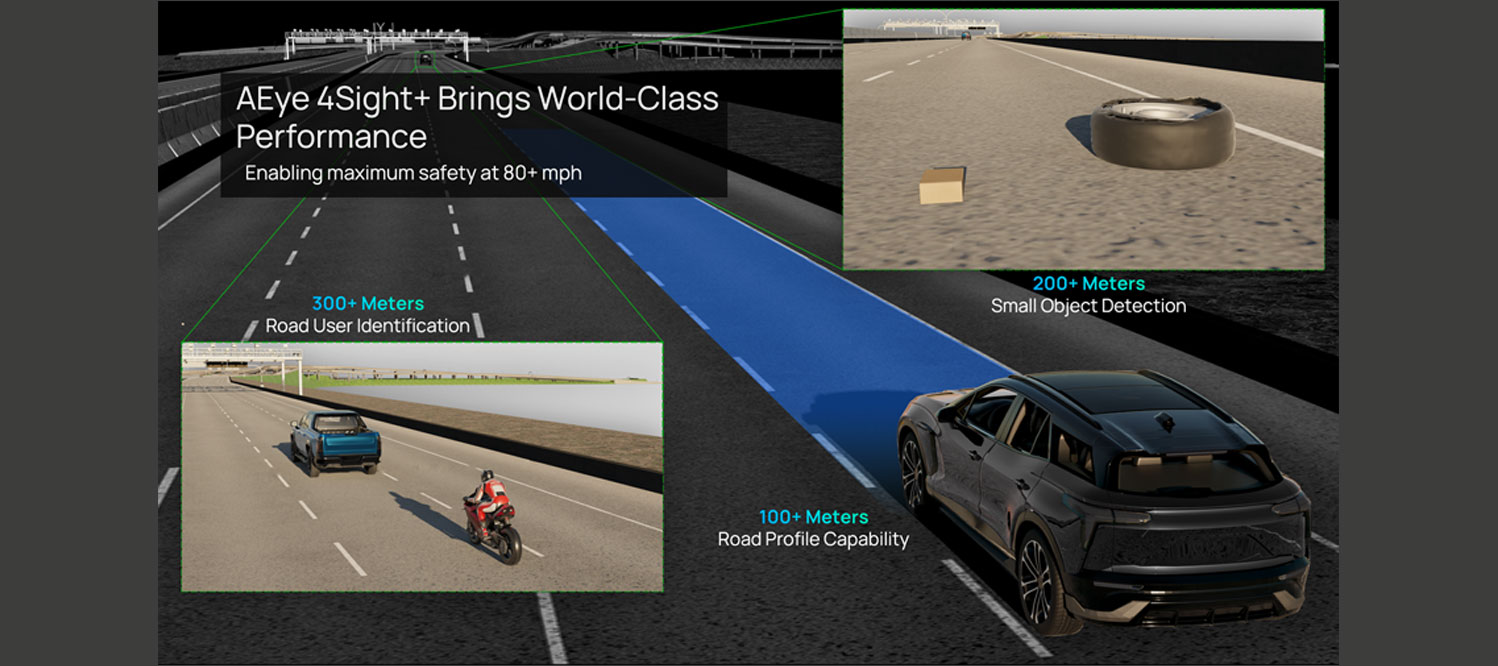
Aeye Tech Expected to Improve Path-Planning, AV Behavior in Traffic