Five Fraunhofer institutes—including the Institute for High Frequency Physics and Radar Techniques FHR—have joined forces as part of the Smart Headlight project to create a method of installing sensors that is both space-saving and as subtle as possible, without compromising on function or performance. The project’s aim is to develop a sensor-integrated headlamp for driver assistance systems that makes it possible to combine a range of sensor elements with adaptive light systems. It is hoped that this will improve sensors’ ability to identify objects on the road, and especially other road users such as pedestrians.
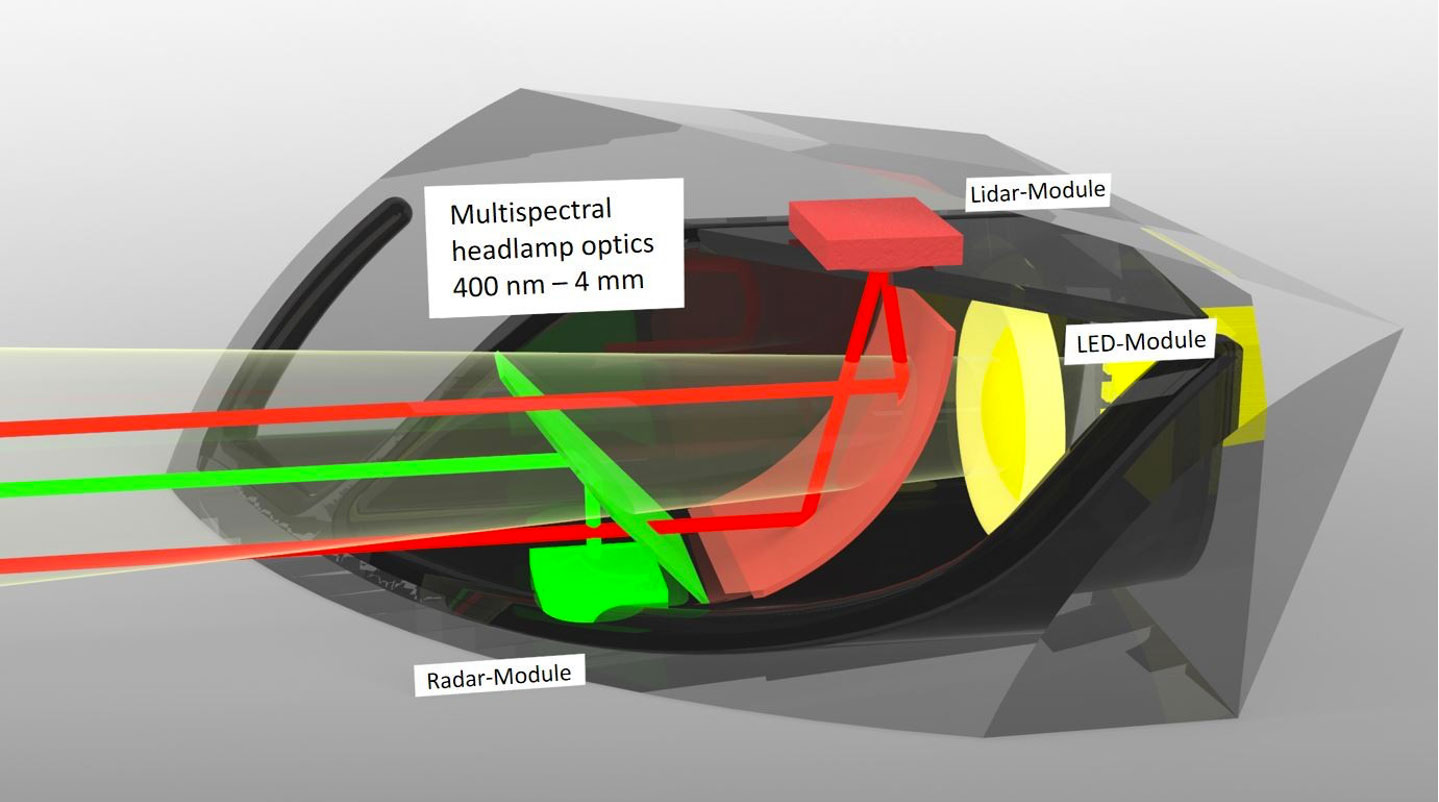
The first stage in creating headlight sensors involves designing a lidar system that is suitable for integration into automotive technology. This also needs to consider the fact that the light beamed onto the road by the headlamp cannot be impeded by the two additional sensors, even though the LEDs that are responsible for the light are located far back in the headlight. For this reason, the researchers are positioning the lidar sensors at the top and the radar sensors at the bottom of the headlight casing.
At the same time, the beams from both sensor systems need to follow the same path as the LED light— something made more difficult by the fact that all the beams involved have different wavelengths. The visible light from the headlamp measures in the region of 400 to 750 nanometres, while infrared lidar beams range from 860 to 1,550 nanometres—different, but still relatively close to the visible-light range. Radar beams, on the other hand, have a wavelength of four millimetres. Guiding the beams coaxially in this way is crucial for preventing parallax errors, which are complicated to untangle. Additionally, arranging the sensors next to one another would take up significantly more space than a coaxial configuration, so the researchers are getting round this using what are known as bicombiners. To combine LED light and lidar light, this solution uses a dichroic mirror with a special coating, which guides the two beam bundles along a single axis by means of wavelength-selective reflection. The same effect happens in the second combiner (albeit in a more complex way due to the very different wavelengths), where the LED light; lidar light, and radar are combined. As radar sensors are already in widespread use in the automotive sector, bi-combiner designs must allow manufacturers to continue using existing sensors without the need for modifications.
The combination of lidar and radar fields of view will enhance the global performances of this multi spectral sensor. Lidars and cameras, for instance, demonstrate limited performance in situations where visibility is poor, such as foggy and dusty environments whereas radar systems can see right through dense clouds of fog. And radar systems are not very good at categorisation, while optical systems can tell whether something is a person or a tree.
Smaller light modules and lidar sensors and integrated radar sensors will make it possible to create multi-sensor concepts integrable in current headlamp internal volumes.
DVN comment
It can be attractive to merge different technologies such as lidar and radar in coaxial fields of view, especially if the functional requirements find an advantage in integrating these sensors in the corners of the vehicle. For car manufacturers, this simplifies the integration of each sensor, on the other hand it can induce higher costs and complexity on lighting systems. First results of this concept were presented and discussed at the 4th DVN Automotive Lidar Conference in November 2021. We are closely following ongoing progress of the Fraunhofer research conglomerate.










