
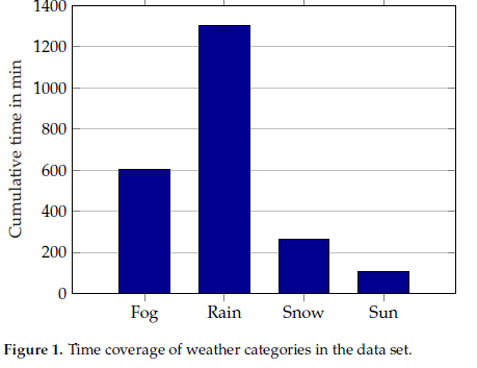
A research team at the Technical University of Darmstadt in Germany have conducted a long-term study about the influence of adverse weather conditions on the detection performance of commercially-available lidar sensors. Lidar sensors from three suppliers were analysed; data were recorded over the six months from October 2021 to March 2022 on the August-Euler Airfield close to Darmstadt. This diagram shows the distribution of weather conditions during the measurement times in the recording period:
The experimental setup consisted of a test station with lidar sensors and reference sensors for environmental conditions as well as reference targets placed in front of the test station:
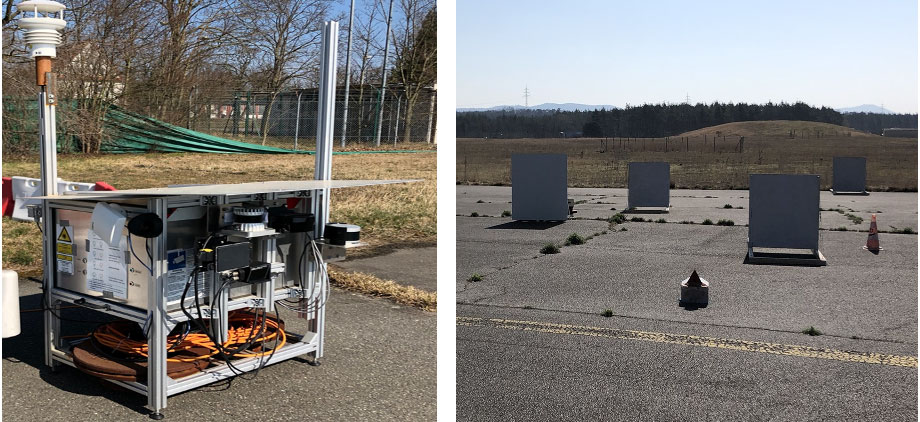
The targets were plywood boards painted with RAL7047 (Telegrey 4) lacquer. The reflectivity of the target boards was 50 per cent, and the boards were placed at of 50; 58, and 66 metres’ distance. The study revealed results for detection rates under the four weather conditions. As an example, these diagrams depict the results of the three sensors under rainy conditions:
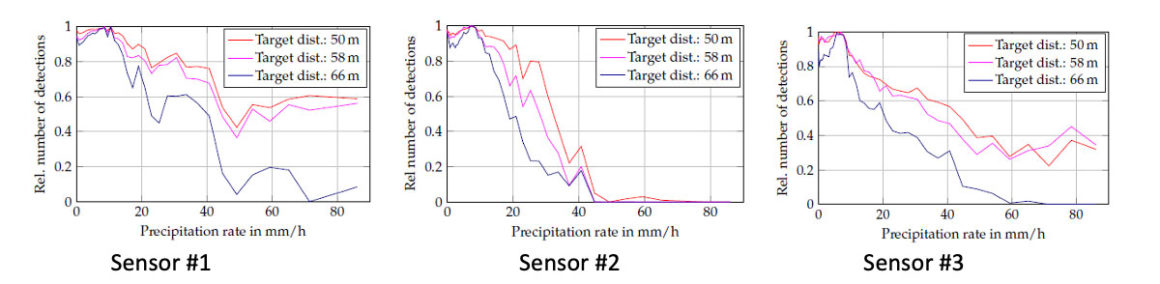
Detection probability of the targets starts to drop around a precipitation level of 10 mm/h for all three lidar sensors. At greater rainfall, the behaviour of the three sensors is quite different and no uniformity can be observed. To assess these results it should be noted that average European rain fall rates are around 5mm/h , very strong rain fall around 30 mm/h and rainfall during thunderstorms around 50 mm/h. Also interesting results for the other weather conditions can be found in the study.
DVN comment
The TUD research team conducted a well-designed study on the influence of weather conditions on lidar sensor performance. The results quantify weather-related detoriation of detection rates, as well as significant differences in behaviour among different lidar sensors under adverse weather conditions. An aspect not yet covered in the study is the comparison with other sensors types like camera or radar. Also interesting would be the investigation of a system with sensor fusion of camera, radar and lidar. More independent research like this should be encouraged and executed to map this crucial topic of influences of surrounding conditions on detection rates—then those study results can shape and guide further research and development to address the relevant needs and issues. DVN is approaching the authors of this study for a presentation at our next lidar conference on November 31st/December1st in Wiesbaden.










