Helsinki, Finland now has Velodyne Lidars to collect traffic data and participate toward road safety improvements. The installations demonstrate the essential contribution of lidar in the counting and classification of multimodal traffic, as well as in the detection and prediction of collisions between vehicles and VRUs and other traffic participants.
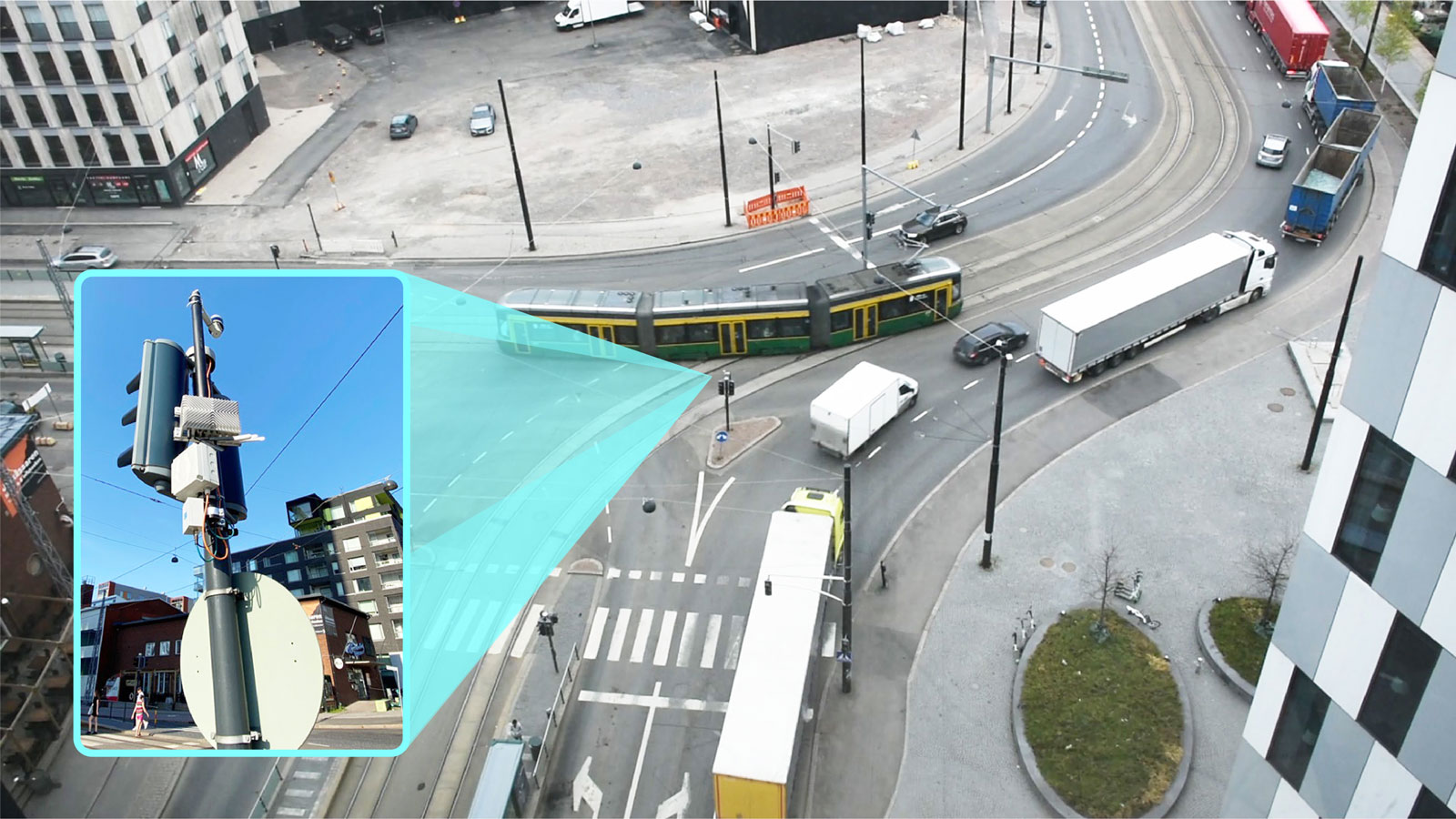
The project, called IIS (Intelligent Infrastructure Solution), combines Velodyne lidar sensors; artificial intelligence software from Bluecity, and V2x communications from Commsigna to monitor the flow of traffic—vehicles, pedestrians, and cyclists—at three junctions in Helsinki’s Jätkäsaari district.
These intersections are equipped with V2x roadside units to send C-ITS vehicles (Cooperative Intelligent Transport Systems) warning messages before possible collisions with pedestrians or cyclists.
The system is demonstrating its efficacy in traffic measurements and in collision predictions, especially when red-light violations occur. The accurate object detection and classification offered by Velodyne lidars, and the consequent good prediction of vehicles and pedestrian trajectories, will allow dependable cooperation between IIS data and traffic signal controllers.
The full IIS solution stack is deployed on three continents—North American installations are in Texas; Florida; Nevada; California; New Jersey; Missouri, and Canada. In urban applications where cameras can be used to detect pedestrians, the advantage of Velodyne’s lidar sensors is to accurately predict pedestrian trajectories while keeping the pedestrians’ identities safely anonymous—at any ambient light level.
DVN comment
The integration of lidars in infrastructural perception systems, and more globally in C-ITS ecosystems, is another manner to enrich AD and ADAS embedded systems. In AD vehicles, cooperative sensing systems could efficiently complete the perception offered by lidars, radars, and cameras. In urban situations, the perception’s horizon is often limited by masking effects (vehicles, buildings, urban furniture), so AD trajectories could be more accurately predicted with cooperative sensing.









