
The DVN Lidar team put on the second Think Tank seminar on 30-31 May, to promote the development of our lidar Community further in line with our roadmap. The event gathered about 50 people, representing 30 companies and institutes. It must be noted that Chinese automotive industry was represented by 12 companies—nine automakers and three tier-1 suppliers.
Here’s a recap of the docket and events
First Day: 30 May
18:30: Welcome of Participants
19:00: Cocktail
20:00: Dinner
Second Day: 31 May
Welcome by Hector Fratty, DVN CEO
Introduction of participants:
Based on the list of participants, Leo Metzemaekers asked the in-person as well as online attendees to introduce themselves. The picture shows the a group photo of in-person attendees.
Live: Jennifer Ruskowski (Fraunhofer IMS); Eric Amiot (Valeo); Michael Kiehn (Ibeo); Adrian Zlocki (FKA); Uensal Kabuk (Huawei); Clemens Hofmann (AMS Osram); Thomas Sommer (Lumentum); Achim Freiding (Hyundai); John Peek ( KSLD); Thomas Luce (Microvision); Andre Malz (Opsys); Bircan Taşlica (TÜV); Leo Metzemaekers/Ralf Schäfer/Geoffrey Lebrun/Alain Servel (DVN)
Online: Li Pu/Jiang Haipeng (Great Wall), Shuangni Wang/Weichao Wang/Zhilei Zheng (Hycan); Yongping Sheng/team (Voyah); Kaiwei Hu (Chery); Fengwu Su/team (BYD); Huahai Luo/ZHI Feng Xie (Hozon Auto); Mingwei Tan/Hongliang Han (FAW); Zikui Han/Yu Yang (Xiaomi); Weibao Wang/Xudong Shi/Heng Zhao (Jidu Auto); Andreas Printz (Aeye); Gregory Poillion/Juergen Scherschmidt (Blickfeld); Henri Haefner (Cepton); Motohiro Komatsu (Koito); Matthew Everett/Thomas Sommer (Lumentum);Matthew Webb (Luminar); Yang Zhi/Jin Hui (Mind); Xiangyong WANG (Xingyu); Meng Han (SLD); Min YE (Sunny Optics); Ann Ai/Tylon Zu/Hector Fratty (DVN);
Recap on DVN lidar Community Leo Metzemaekers and Ralf Schaefer made a recap on last evolutions or events in the community since the first Think Tank in February:
• Growing number of participants / companies in the lidar community
• First two newsletters published
• More interviews and announcements will follow
• Additional activities are being scheduled
The slide deck of this event can be downloaded from the DVN website.
Morning Presentations
Prof. Ling Ming : Shanghai University of Engineering Science(SUES)/ Professional Committee on Beidou Application of Standards and Regulations Working Committee of CAAM (working group of vehicle Lidar)
“The Progress of China’s Vehicle lidar Standard”
(you can watch this video on the DVN Website)
Professor Ling Ming gave a comprehensive overview of the lidar standardisation situation in China, especially the target to attain GB standards for lidar as early as 2024-25. Driving force is the ambition to launch L3+ vehicles massively in China. After his presentation and to answer participant’s questions, Pr Ling Ming pointed out that China’s standards organisations are ready to work on harmonisations with SAE or UN, and that while Chinese standards are targeted to be ready before 2025, some Chinese automakers may produce lidar equipped vehicles before then.
Dr. Adrian Zlocki : Head of Automated Driving at FKA / Aachen University
“Specification and Test Framework for Automotive Lidar Sensors”
(this presentation can be downloaded from the DVN website)


FKA can assess lidar sensors not only in lab testing, but also on highways under adverse weather conditions. Examples of such diverse rain test scenarios were shown. The goal of the project is to generate a platform which allows comparable performance characterisation of lidar sensors. The final target of the project is to establish a DIN/SAE standard. Such a standard, although not a regulation, can help automakers as well as suppliers to have a firm ground to stand on.
After the presentation and to answer some questions, Dr Zlocki said:
- Their tests are based on typical road scenarios supplied by their customers, but they don’t use specifications associated with lidar under tests.
- In case of rain-effect tests, they use protocols (drop size, density…) similar to those used for lighting tests.
- FKA can make tests for one automaker on different lidars separately for benchmarking, but results are limited to point cloud outputs; target clustering and tracking algorithms efficiency are not evaluated.
- Test results or benchmarks are not published.
- Tests of perception systems including different sensors and artificial intelligence and/or deep learning, is not in the scope of FKA.
- Sensor’s environment simulations are not in their scope.
Li Pu, Department Director Intelligent Driving Platforms at Great Wall Motors
“Automaker Message on Lidar”
(this presentation can be downloaded from the DVN website)

After the presentation and to answer some questions, Mr Li Pu pointed out that lidar sensors are used in context of L2+ functions only activable on highways—traffic jam pilot, for example. Urban functions are not still deployed, due to the complexity of urban scenarios.
Afternoon session
After lunch three working groups broke out to consider assigned topics:
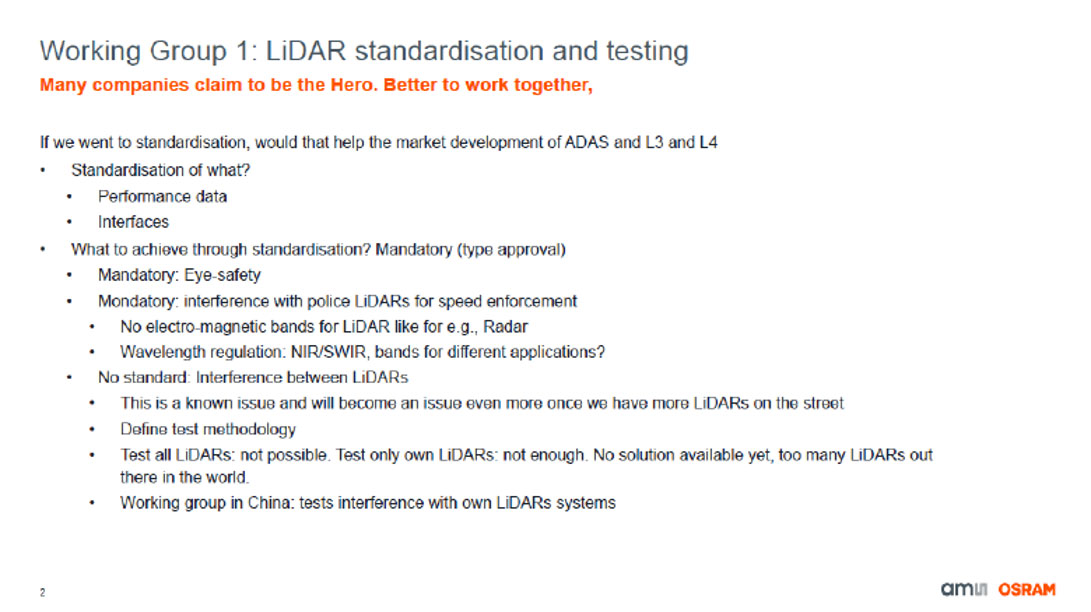
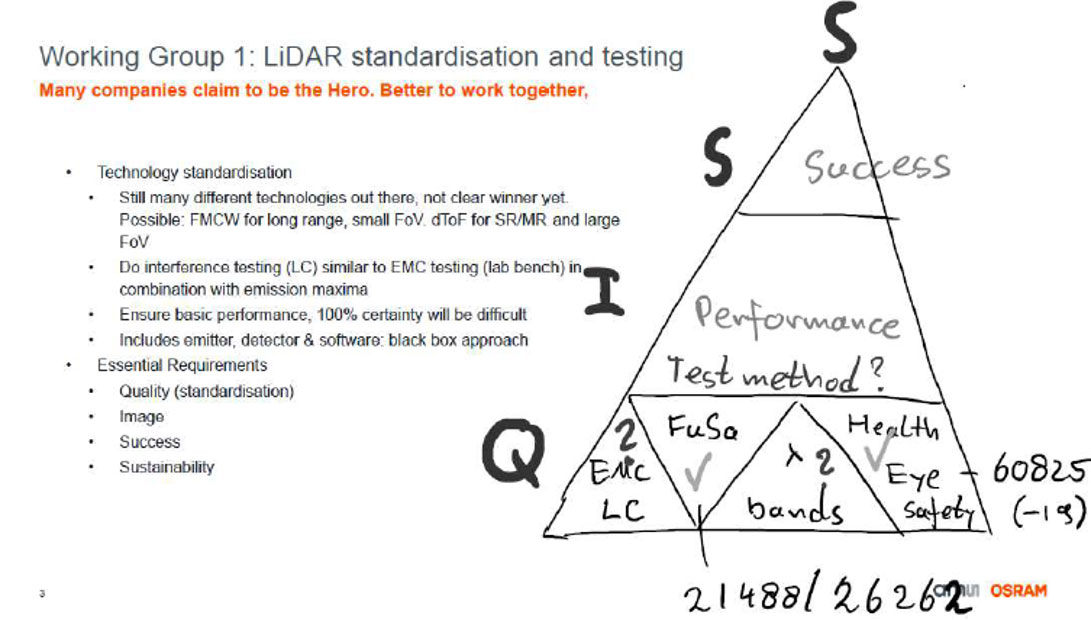
WG1: Can standardisation and testing support market development of lidar for ADAS and L3-4 ?
WG2: Regulation and Standardisation—threat or opportunity?
Results:
- Regulation is a must for safe introduction of lidar. Set minimum requirements and build on them in the years to come. Harmonisation of regulation is better for business worldwide.
- Regulation is a great opportunity for growing the business worldwide. Pedestrian safety must be regulated.
- China is ahead with regulation and does not wait for a UN initiative. Eye safety must be regulated. Group standards should be pushed. China would like to work towards harmonisation with UN and hopefully also with SAE. Group standards should target at high reliability, and for sufficient performance. Otherwise, realistic cost targets cannot be met.
- Regulation is an opportunity for growing the business, but pace should not be too fast. Maybe ranking next to regulation may help the industry.
- What needs to be regulated? Safety; redundance of safety systems; double lidar in combination with camera. Environmental requirements? Regulation should be technology-neutral.
- Different dimensions, regulation of sensors (eye safety / glare) should be sufficient for the time being. At the safety stage we are still in, the industry needs freedom to operate.
WG3: How to Create the Best Lidar Newsletter?
- To resume discussion of participants, this newsletter would:
- Be distributed monthly on a specific website, with a specific name and logo
- Be a social network between members of lidar community
- Focus only on the automotive market and applications
- Share lidar news from the different regions: Europe, Asia, US…
- Be neutral in term of interviewed companies and selected news
- Periodically focus on standards in progress (DIN, UN, SAE, ISO, GB…); lidar and system environment (AI, Fusion with other technologies…); lidar physical integration, and activities of community members.
Next Community Events
- Lidar Workshop: Planned for 26-27 September in the Frankfurt Area; date and venue to be confirmed.
- DVN 5th Automotive Lidar Conference: 30 November–1 December, Frankfurt area (Wiesbaden) with excellent conferencing and networking facilities
Our DVN lidar conferences are becoming a real tradition: this year already the 5th version will take place. We plan our conference to be a live-only event, so we recommend you register as early as possible.
The rubrics for this year’s event are Applications
• Use Cases & Testing • Technology & Ecosystem
The event will be at the Dorint hotel in Wiesbaden, close to the central hub of Frankfurt and with excellent conferencing facilities to network and to host our exhibition.
Participants consistently appreciate our DVN Lidar events, especially our high-quality presentations and good networking opportunities. We’re striving to exceed all expectations with this, our fifth conference.
If you are interested to join as participant or want to be a speaker or an exhibitor, or for more information, please email Geoffrey Lebrun, Leo Metzemaekers, or Ralf Schäfer.










