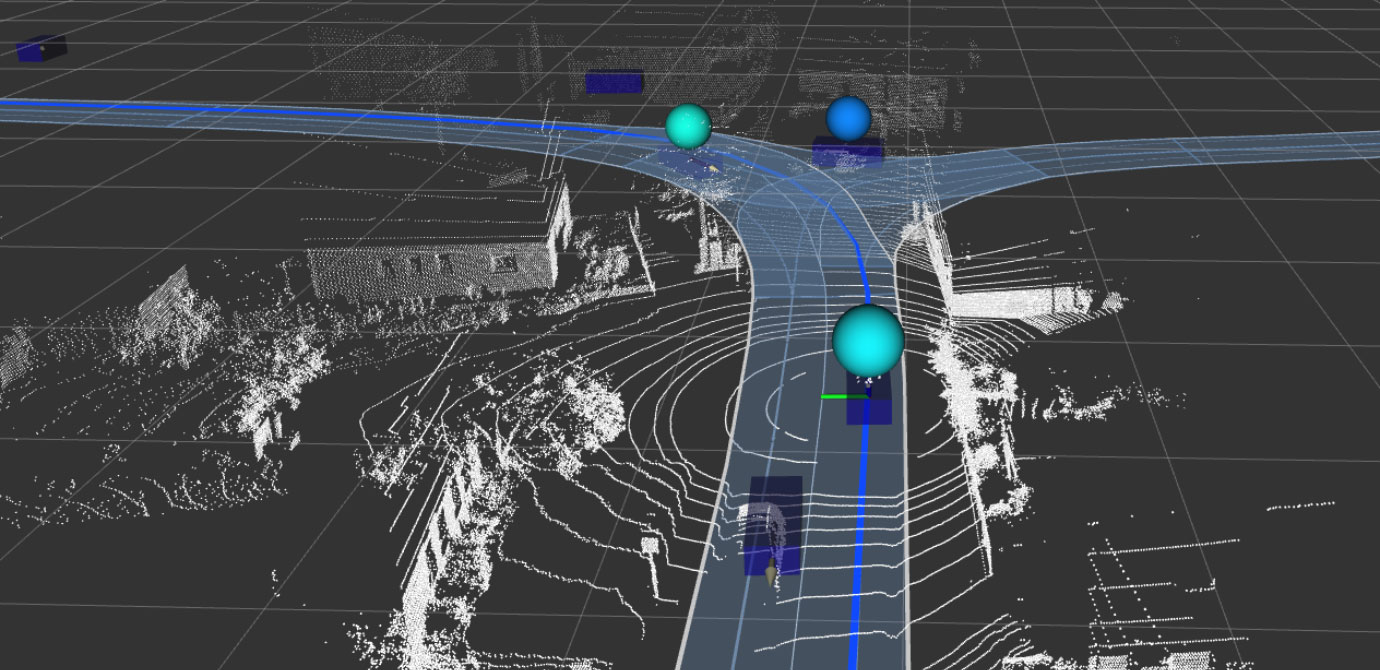
在“复杂交通情况下协同自动驾驶的局部环境模型”研究项目(Lukas)中,博世、InMach、IT设计师、梅赛德斯-奔驰、诺基亚以及乌尔姆大学和杜伊斯堡-埃森大学研究了城市未来的混合交通以及提高交通安全和效率的方法。这主要通过使用来自当地环境的数据以及自动和非自动道路使用者与基础设施之间的通信来实现。
卢卡斯研究项目:提高未来混合交通安全性
在“复杂交通情况下协同自动驾驶的局部环境模型”研究项目(Lukas)中,博世、InMach、IT设计师、梅赛德斯-奔驰、诺基亚以及乌尔姆大学和杜伊斯堡-埃森大学研究了城市未来的混合交通以及提高交通安全和效率的方法。这主要通过使用来自当地环境的数据以及自动和非自动道路使用者与基础设施之间的通信来实现。
Input your search keywords and press Enter.










