
Tesla’s Self-Cleaning Camera Lens Patent: Inbuilt Wiper
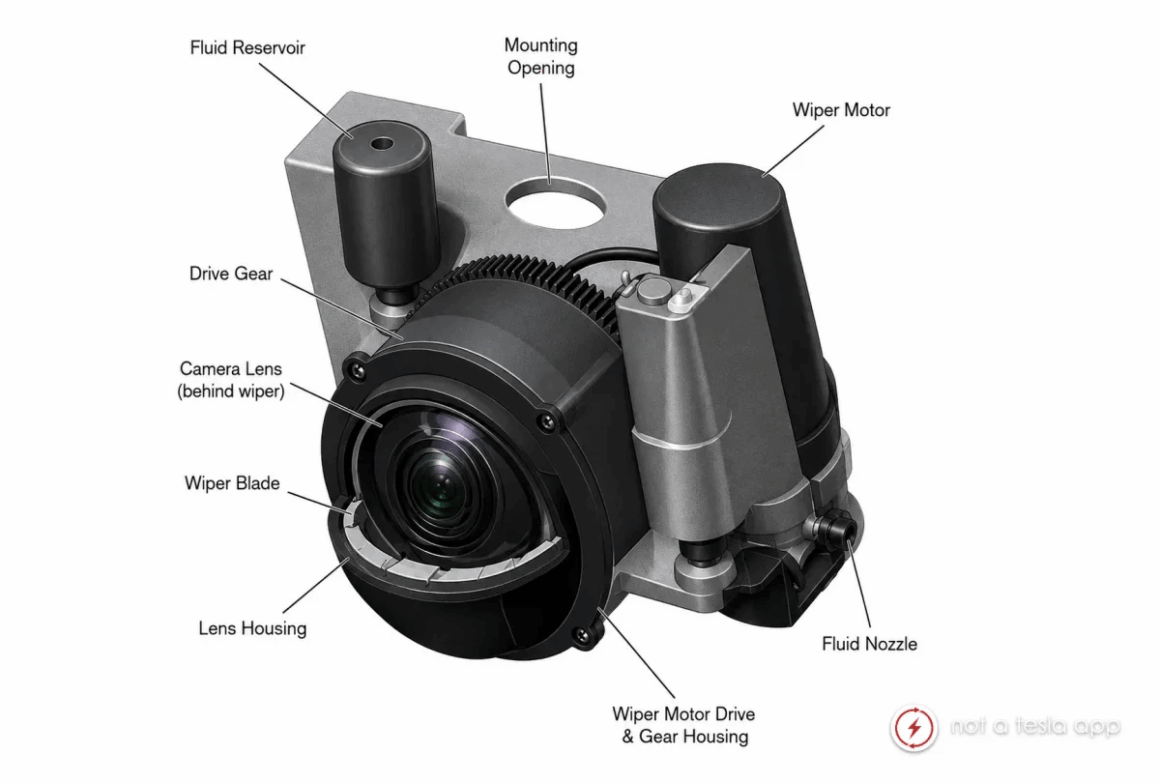
Automated camera cleaning needs to be solved for truly autonomous driving. Tesla has patented a compact lens-cleaning system designed to keep vehicle cameras clear of dirt, water, mud, and snow. The patent outlines a miniature cleaning assembly that combines a fluid dispenser and a mechanical wiper directly around the camera lens – a potential solution that works without requiring large washer nozzles or external cleaning hardware.
The system centers around a camera lens housed within a protective assembly. Integrated into the housing is a small fluid reservoir and a dispensing mechanism capable of spraying cleaning liquid directly onto the lens surface. After the fluid is applied, a small wiper blade moves across the lens to remove debris, like how an eyelid lubricates an eye. Unlike traditional windshield wipers that sweep across a relatively flat surface, Tesla’s design uses a compact blade that follows the lens’s curve. Figures throughout the patent show the blade rotating around the lens while remaining in contact with the surface.

Tesla describes the possibility of using various cleaning fluids, including water, alcohol-based solutions, washer fluid, lubricants, or other cleaning agents, depending on environmental conditions.
Because the cleaning hardware is integrated into the camera assembly, the camera housing can remain compact, allowing Tesla to keep the same camera placements as today, even in tighter areas like the fender and B-pillar.
If this design is implemented for production vehicles, it could improve how well the cameras can clear their lenses, especially for harder-to-remove debris, such as insects, or for cameras that may get dirtier, such as the front bumper one.
IPG’s Approach Presented at UTAC Safety Innovation Forum
At the Global Development and Innovation Forum on Automotive Safety Technologies in the Intelligent Driving Era organized at UTAC in France, IPG positioned simulation as not an isolated engineering activity, but a continuous systems-engineering framework spanning early function development, software validation, hardware integration, proving-ground correlation, and regulatory submission. The core message was that full-vehicle simulation, when combined with scalable automation, open integration interfaces, and traceable validation workflows, enables OEMs and suppliers to manage the growing complexity of software-defined vehicles while reducing development time, cost, and late-stage quality risks.

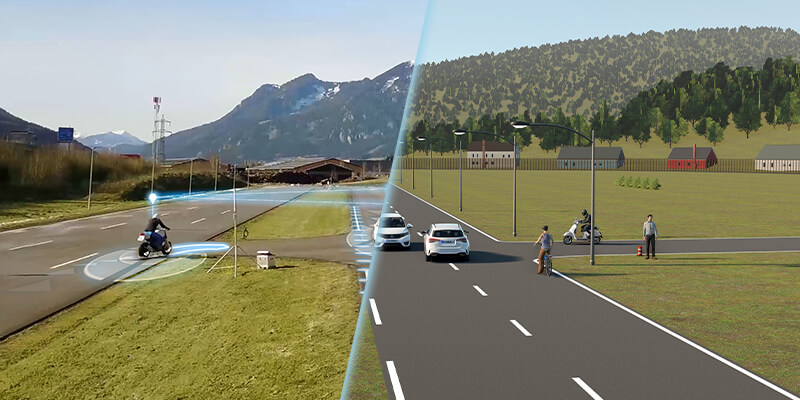
IPG Automotive CarMaker proposes a full-vehicle simulation approach centred on virtual test driving, combining software, hardware interfaces, test systems, and engineering services to support verification and validation across the vehicle lifecycle. Framed as automotive systems engineering, it assesses vehicle functions within the full operating context—roads, traffic, sensors, infrastructure, and test targets—so teams can evaluate both subsystem behaviour and overall system performance before physical prototypes are complete.
From a technical standpoint, IPG’s approach reveals several capabilities:
- Full-vehicle dynamic simulation rather than component-only analysis.
- Representation of traffic, road geometry, and environmental context.
- Sensor-aware simulation for radar, camera, lidar, and related perception functions.
- Integration of software functions, ECUs, mechatronic subsystems, and real hardware into a common test environment.
- Scalable execution of large scenario sets through HPC and cloud-based computation.
This architecture supports ADAS, automated driving, braking and steering development, powertrain evaluation, and endurance and robustness testing.
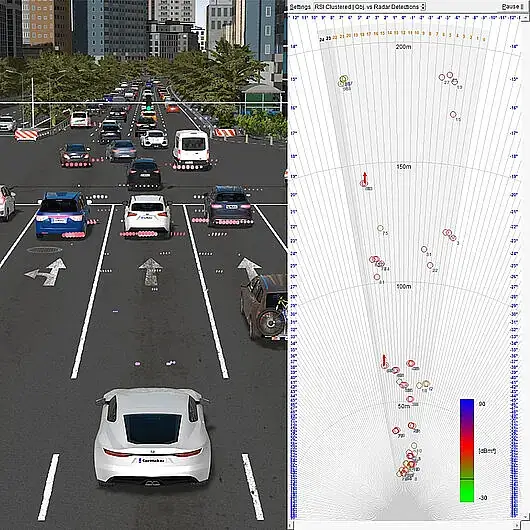
IPG described a simulation stack in which the vehicle under test is embedded in a high-fidelity digital environment. This includes roadway topology, moving traffic actors, static obstacles, test objects, and environmental conditions, along with models of onboard sensing systems.
A critical technical point is that the simulated environment must reflect the sensing modality under evaluation: the world seen by a radar sensor, for example, is defined by object reflectivity, radar cross section behaviour, and Doppler effects, whereas camera and lidar functions depend on different physical observables. The underlying claim is that credible virtual testing requires digital twins not only of the host vehicle and its functions, but also of targets, sensors, proving-ground infrastructure, and assessment metrics.
This is consistent with current industry emphasis on realistic sensor and environment models for scalable validation. IPG Automotive highlights realistic testing and validation in virtual environments, while the UNECE DCAS framework formalizes credibility requirements for virtual toolchains.
IPG frames the automotive context as a convergence of three pressures: rising software complexity, architectural transformation, and increasing demands on validation coverage. Modern vehicles are treated as software-intensive cyber-physical systems with extremely large codebases, complex electronics integration, and tighter release cycles. At the same time, electrical and electronic architectures are shifting from numerous distributed ECUs toward centralized or zonal platforms built around high-performance computing. In this environment, late hardware-centric validation becomes too slow and too costly. The proposed response is a shift-left methodology in which the largest share of testing is performed as early as possible using model-in-the-loop, software-in-the-loop, and virtual ECU workflows, before physical prototypes are available. Recent CarMaker updates also emphasize early virtual ECU integration and the acceleration of software and system tests at the earliest development stages, reinforcing the same shift-left logic.
A central technical theme is continuity: the same virtual prototype, scenario logic, key performance indicators, and evaluation criteria should persist across all major validation stages. This reduces disconnects between teams, preserves traceability, and improves correlation between simulated and physical results. The workflow presented can be summarized as follows:
- Model-in-the-loop and software-in-the-loop: Early algorithm and function validation using executable models or software components.
- Virtual ECU integration: Inclusion of embedded software artifacts to test system behaviour before production hardware is ready.
- Hardware-in-the-loop: Connection of real ECUs, braking systems, steering systems, or other mechatronic components to a simulated vehicle and environment.
- System and rig testing: Use of benches and integrated setups to validate interactions between physical subsystems and virtual context.
- Proving-ground augmentation: Testing of real vehicles with simulated or emulated objects and scenarios to bridge physical and virtual evidence.
- Post-production validation: Reuse of the same framework to verify over-the-air software updates and ongoing functional changes after start of production.
This lifecycle view closely matches [IPG Automotive]()’s published positioning that the same virtual prototype and evaluation basis should support every stage of the development cycle.
IPG repeatedly linked simulation value to scale. Because critical safety validation now depends on broad scenario variation, robustness analysis, parameter sweeps, and repeatable KPI calculation, virtual testing must support thousands of automated executions on HPC or cloud infrastructure. This is especially important for edge-case exploration, standards compliance, and robustness layers that cannot be covered efficiently by proving-ground testing alone. Automation is therefore not a convenience feature but a validation requirement: it enables systematic variation of trajectories, speeds, overlaps, sensor conditions, and environmental factors while maintaining repeatable assessment logic.
The second half of IPG’s presentation focuses on the growing formalization of virtual testing in external safety assessment. Euro NCAP identifies dedicated protocols for 2026-2028, and industry material describing the 2026 framework highlights broader crash-avoidance coverage, stricter active-safety assessment, and acceptance of simulation under controlled validation and dossier processes. The presentation argues that virtual testing for these protocols is not limited to reproducing scenarios; it also requires precise KPI computation, tolerance handling, standardized scenario definitions, reproducible post-processing, and alignment with physical-test references. The overall implication is that simulation workflows must be auditable and assessment-ready, engineering-oriented.
A technically important point in the presentation is that virtual testing depends on reference-aligned digital representations of physical targets and test assets. For example, if a target is defined in standards by geometry, materials, radar signature, or characterization procedures, then the corresponding digital model must preserve those properties in a traceable way. This requirement extends beyond the vehicle model to include proving-ground surfaces, targets, sensor signatures, weather effects, and scoring procedures. The relevance of credibility is reinforced by UN Regulation No. 171, whose annexes include principles for credibility assessment when a virtual toolchain is used for DCAS validation. The regulation emphasizes system validation, traceability, model and simulation verification and validation, and analysis of overall performance, all of which align closely with the presentation’s technical narrative.
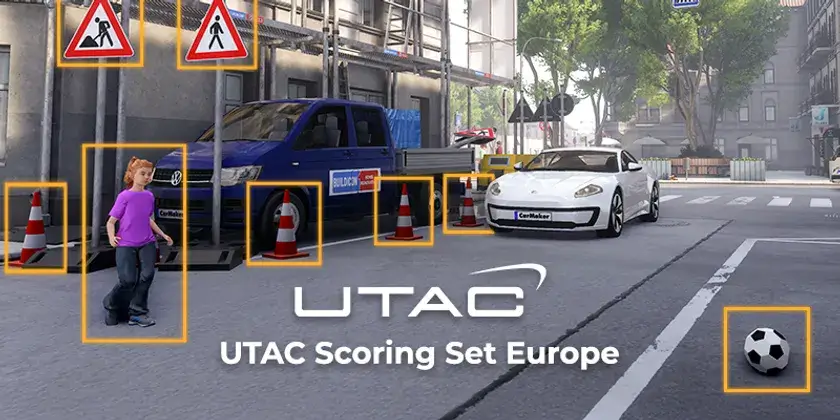
Public descriptions of this collaboration state that it aims to combine simulation and assessment in a single workflow, including scenario catalogues executable in CarMaker, evaluation using UTAC scoring methods, realistic virtual environments, and tighter correlation between simulation and physical testing. Technically, this matters because it links engineering simulation to assessment-grade evidence generation: scenario execution, post-processing, score calculation, and dossier preparation become part of one integrated validation chain rather than disconnected tasks.
All in all, IPG Automotive advocates a full-vehicle, systems-engineering approach to simulation-based development rather than isolated subsystem validation.
The technical backbone is a consistent virtual prototype reused from early software development through hardware integration, proving-ground correlation, and post-production updates.
Credible virtual testing requires digital twins of vehicles, sensors, targets, environments, and assessment logic, not only executable scenarios.
Scalable automation on HPC or cloud platforms is essential to achieve the scenario breadth and robustness coverage demanded by modern ADAS and automated-driving validation.
Euro NCAP 2026 and UN Regulation № 171 indicate that simulation is becoming part of formal assessment and homologation workflows, increasing the importance of traceability, verification, validation, and submission-ready evidence.
The IPG Automotive–UTAC partnership illustrates the move toward integrated platforms that connect engineering simulation, physical-test correlation, scoring, and regulatory preparation.








