
DVN held the 2026 AEB Workshop on 25 March at Marelli HQ in Southfield, Michigan, near Detroit. Around 60 people attended from OEMs including GM, Ford, Stellantis, Honda, and Nissan; agencies such as MNDOT, tier-1s like Hyundai Mobis, and technology suppliers.
Demonstrator cars from Compal were driving around, showing some impressive thermal cameras and object classification capabilities.
We will make presentations that we are allowed to distribute available to members and attendees; in the meantime, here’s a summary:
Meeting the AEB requirements of FMVSS 127 by 2029 is still a huge challenge.
The industry is not comfortable with some of the use cases (such as high speed with only headlamps illuminating) and no reasonable solution is ready in time for a 2029 implementation. The expectation is there will be some adjustments made by NHTSA to the maximum test speeds or the implementation schedule.
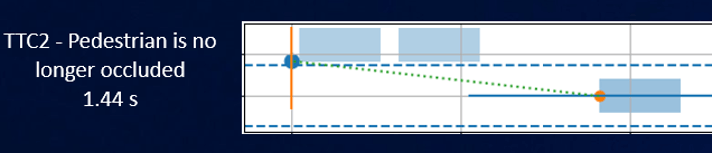
Stellantis showed the 50 km/h test with an occluded pedestrian requires immediate braking action with 1g because of a very short TTC, when latency constraints (210-340ms for sensor + fusion + decision) and brake build parameters (250ms) are taken into account; the top speed clearly challenges system performance.
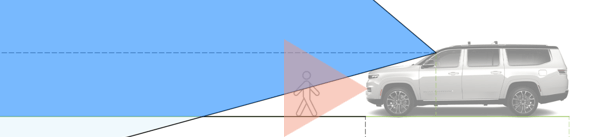
A second issue is when the pedestrian is not fully seen either at low speed (only upper body is seen due to the camera mounting position) or for PAEB tests in low beam mode with no streetlight (for some tests, the camera will see only the legs of the pedestrian). A dual sensor setup is then required, typically using camera & radar based on current technologies and cost targets. We have seen significant improvements of the radar perception software (e.g., Perceiv.ai), which could lead to an affordable solution.
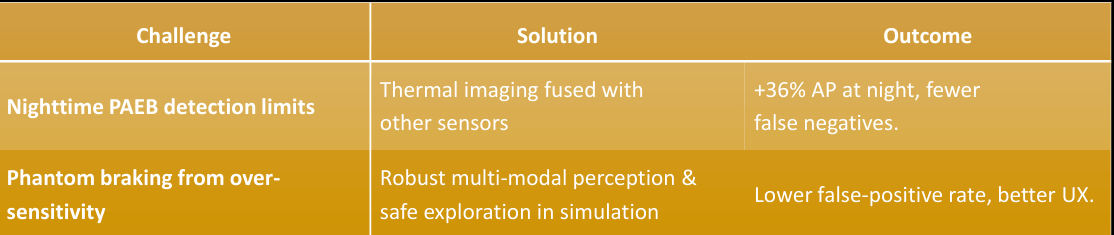
A third issue is the false braking risk: IR cameras can support superior detection of pedestrians in all light and weather conditions, and could greatly help here, but might apply only to high-end cars due to high cost (presentations by Compal, FLIR, Lynred).
There are new opportunities, too: Marelli and AMS Osram presented a future low-cost solution with a low-cost near-IR illumination add-on in the headlamp, to see the full body of the pedestrian without adding any visible light above the horizon (which would violate low beam glare limits – maybe this NIR solution will allow for adequate machine vision without further increasing already-high levels of U.S. low beam glare). But the solution, requiring the illuminator add-in and modifications of existing cameras, might take some time before it is on the shelf.
Deployment of new AEB features is a significant challenge around the world.
FMVSS 127 is the challenge in the US, and it’s not alone in the world. AEB deployment is speeding up in China, with GB 39901 set to require ADB not only on passenger vehicles, but also light commercial vehicles; typicall use cases for stationary vehicles and pedestrians are as stringent as NCAP 2026. So we’re looking at more worldwide AEB requirements, and more stringent ones, in the coming years.
Ansys said simulations are getting more and more important to support validations and type approvals. The Chinese AEB regulation will allow simulations to be used in up to 67 per cent of the use cases, contingent on demonstration of the accuracy of the simulations. Ansys says they achieve 97-per-cent accuracy with their simulation tools which apply to radars, cameras, IR, and lidars.
Achieving L2+ and L4 Safety Targets
Autoware said the key is to solve the ‘long tail scenarios’, especially the unknown edge cases. Accidents show that sometimes the sensing performance is enough, but the AI control software is not up to the task. There are different concepts, some based on object classification, adding a risk of confusion in unknown use cases leading to potential accidents. Autoware, working on open-source software for L4 and L5 applications, thinks their Sense Seg solution based on important-object detection will reduce the risk of confusion and doesn’t require any training for the classification.

Valeo said new safety features are coming to support L2+ and L4 deployment, such as adaptive warning based on driver gaze, in the form of their Panovision projected display. 5G-V2X can also be used for non-line-of-sight sensing. C-V2X from a pedestrian’s cell phone might also be used to indicate to a vehicle before there’s a sightline, and Valeo is working with Verizon on this. Valeo also announced a central computing win with GM leading to a $250m investment in a factory in Texas.
IMEC is a nonprofit organization working with public funding and partners from the industry, to develop chiplets supporting modular and scalable L2+ and L4 architectures for the automotive and robotics industries. SOPs are slated for not later than 2030.
Improvement of sensing technologies and importance of recalibration over lifetime
Perceiv’s radar AI software shows improving freespace capabilities, and the supplier says many customers are interested.
Forvia-Hella is developing a portfolio of imaging radars from 8 × 8 to 24 × 24 channels, which will support L2+ and L4 applications.
Ascential stressed the importance of calibration over lifetime, and the need of a standard to get dealers working properly and with a standardized process on the recalibrations. A bill is in progress on this topic.
Preparing for the future of AVs
MNDOT (Minnesota Department of Transportation): Minnesota is one of about 16 states that doesn’t have specific rules. Some states allow specific testing and/or deployment. So far there is a lack of federal guidance, so it is left up to the states. MNDOT presented their work to implement a regulation for AVs in their state. Tests have been done with May Mobility over the last three years, and Waymo has recently started testing as well. Key topics include privacy and security, safety verification, liability and insurance, emergency services interaction, and workforce development. There are a number of AV-related bills being introduced in the current legislative session, but – as usual – there are quite different approaches between Republicans and Democrats. There will be an AV Day at the state capitol on 14 April, 2026.
Teradar presented their 300-Ghz imaging radar. This technology should be able to offer detection and imaging performance similar to a lidar, but will work in all weather conditions, and at a lower cost. The first prototype is available and the best guess for a SOP is 2029.
Speakers – Photo Gallery
















